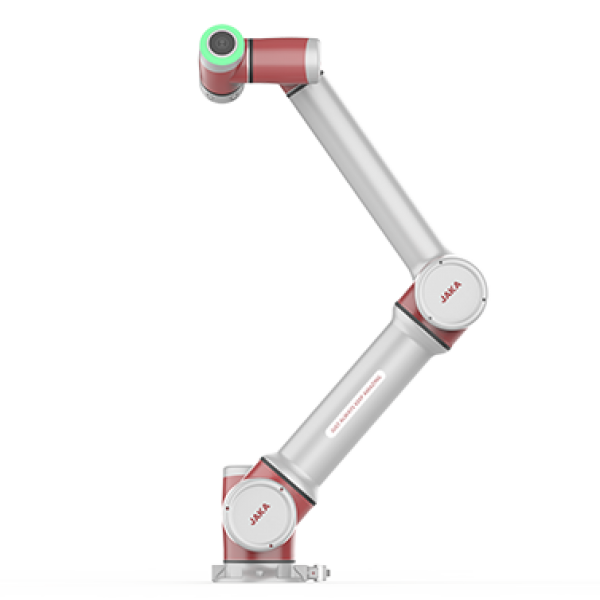
产品特点:JAKA Zu 12协作机器人,自重41kg,负载12kg,工作半径达到1327mm;一体化关节设计,易组装、易拆卸;更高载荷,更大工作半径,替代繁重的体力搬运工作,兼顾部署灵活性和使用便捷性;无需安装安全栅栏,与人、机器人、周围环境共融协作;推荐产业及应用:汽车及相关、精密制造、电器、食品产品特性:有效负载12kg重量(含电缆)41kg工作半径1327mm重复定位精度±0.03mm自由
JAKA Zu 12协作机器人,自重41kg,负载12kg,工作半径达到1327mm;
一体化关节设计,易组装、易拆卸;
更高载荷,更大工作半径,替代繁重的体力搬运工作,兼顾部署灵活性和使用便捷性;
无需安装安全栅栏,与人、机器人、周围环境共融协作;
汽车及相关、精密制造、电器、食品
| 有效负载 | 12kg |
| 重量(含电缆) | 41kg |
| 工作半径 | 1327mm |
| 重复定位精度 | ±0.03mm |
| 自由度 | 6 |
| 编程 | 图形化编程、拖拽编程 |
| 示教器类型 | 移动终端(PAD/手机)APP |
| 协作操作 | 根据GB 11291.1-2011进行协作操作 |
| 通过认证 | CR认证、CE认证、15066认证 |
| 机械臂 | 工作范围 | 最大速度 |
| 关节1 | ±360° | 120°/s |
| 关节2 | -85°,+265° | 120°/s |
| 关节3 | ±175° | 120°/s |
| 关节4 | -85°,+265° | 180°/s |
| 关节5 | ±360° | 180°/s |
| 关节6 | ±360° | 180°/s |
| 工具端最大速度 | / | 3m/s |
| 功耗 | 500W |
| 温度范围 | 0-50℃ |
| IP等级 | IP54 |
| 机器人安装 | 任意角度安装 |
| 工具I/O端口 | 数字输入2/数字输出2/模拟输入1 |
| 工具I/O电源 | 24V |
| 底座直径 | 188mm |
| 材质 | 铝合金、PC |
| 工具I/O尺寸 | M8 |
| 机器人连接电缆长度 | 6m |
| 包装箱尺寸 | 875×580×520(mm)(L×W×H) |
| IP等级 | IP44 |
| 电控柜I/O端口 | 16个数字输入及输出,2个模拟输入或输出 |
| 电控柜I/O电源 | 24V |
| 通信方式 | TCP/IP, Modbus TCP, Modbus RTU |
| 电源 | 100-240VAC,50-60Hz |
| 电控柜尺寸 | 410×307×235 (mm) (W×H×D) |
| 包装箱尺寸 | 600×325×400(mm)(L×W×H) |
| 重量 | 16kg |
| 材质 | 喷塑碳钢板 |