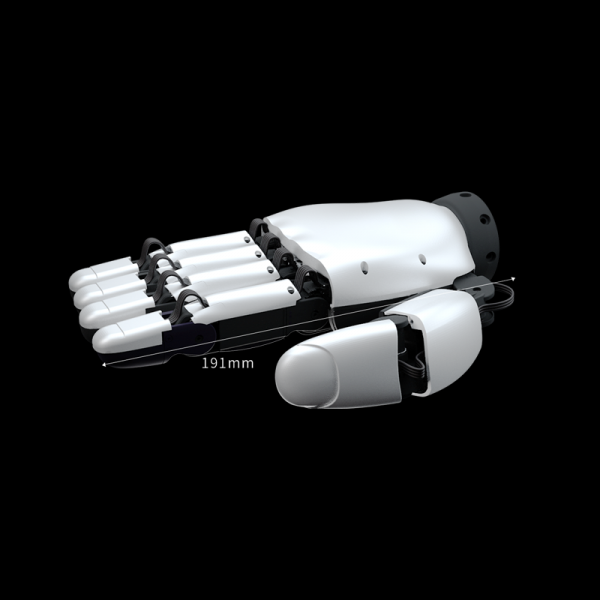
XHAND1是一款全直驱、具备17自由度的高性能灵巧手,采用仿生结构与精密电驱系统,广泛适用于机器人抓取、精细操作与科研实验,为智能操作提供极致灵活的末端解决方案。
| 重量 | 1100 g |
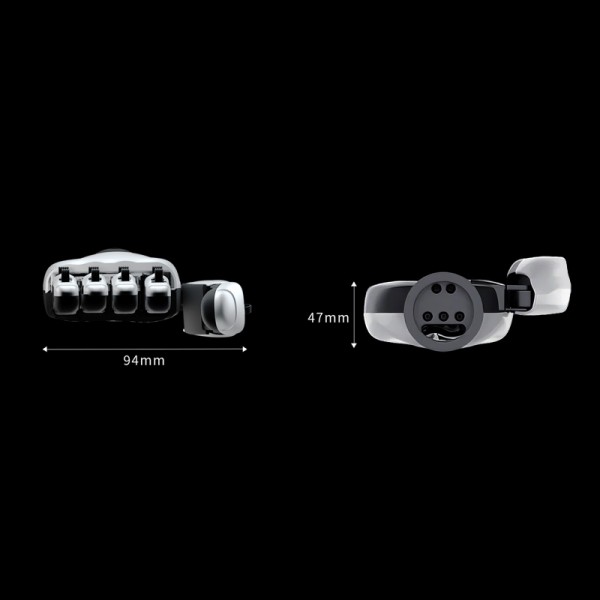
| 尺寸(长x宽x厚) | 191 mm x 94 mm x 47 mm (相当于成人人手大小) |
| 主动自由度 | 12 |
| 自由度分配 | 拇指 x 3 食指 x 3 中指 x 2 无名指 x 2 小拇指 x 2 |
| 拇指传动机构 | 3个自研齿轮传动力控关节模组 |
| 四指传动机构 | 9个自研齿轮传动力控关节模组 |
| 手指尖构型 | 圆润型指尖 |
| 侧摆范围 | -15°~+15°(食指) |
| 指尖重复定位精度 | ±0.20 mm |
| 控制模式 | 位控(低阻尼/高阻尼模式)、电流环力控、力位控制 |
| 指尖力 | 15 N |
| 整手最大握力 | 80 N |
| 最大抓取重量(掌面向左) | 16 Kg |
| 最大抓取重量(掌面向上) | 25 Kg |
| 大拇指最远对指 | 小拇指 |
| 重复开合速度 | >2Hz |
| 反驱阻尼(可反驱) | ≤0.1 Nm |
| 传感器覆盖面积 | 270°五指指尖环绕 |
| 触觉传感器数量 | 5个 (五指指尖270°三维环绕触觉阵列传感) |
| 触觉分辨率 | 12x10(单指尖270°环绕)x5 |
| 触觉维度 | 三维力感知(包含切向力XY) |
| 整手控制频率 | 83Hz |
| 通讯速率 | EtherCAT:100MHz RS485:3MHz |
| 整包字节发送端数量 | 2088~4896 bytes |
| 整包字节接收端数量 | 288 bytes |
| 感知参数 | 指尖:12x10(单指尖)x5触觉三维阵列传感器 关节:位置,速度,温度,电流(力矩) |
| 控制参数 | 关节位置、关节扭矩、关节刚度系数、关节阻尼系数 |
| 空载抓握寿命 | 100万次 |
| 工作温度范围 | -20℃ ~ 60℃ |
| 工作电压 | 24V ~ 72V |
| 静态电流 | 0.15A @48V, 7W |
| 最大电流 | 2.5A@48V,120W |
| 通讯接口 | RS485(USB), EtherCAT |

相比于市面上一些欠驱方案,XHAND1采用纯齿轮准直驱传动,主动关节均在本位且全部解耦,给模仿学习、强化学习等AI算法的开发提供了“真正的自由”;
同时每个关节均可以反驱,可免于被掰坏或者受到意外冲击损坏的风险,抗冲击能力更强;关节高反驱透明度与低阻尼的特性,可以支持直接采用电流环做力控,为专业研究者提供深度的可配性。

高功率密度
空心杯电机

低阻尼小间隙
减速器

高功率密度驱动器
与高精度编码器
XHAND1五个指尖均配有阵列式高精度高分辨率触觉传感器,每个指尖上采集120-300个均匀分布的三维力信息,最小分辨率为0.05N,可以支持机器人做更精准的力控,同时拥有更多的感知能力比如接触觉、滑动感知,并通过面阵力的解算可以得到接触面表面纹理等更多信息;每个触觉传感器上有20个分布的温度阵列,可以感知到接触物体的温度。
XHAND1采用了全自研一体化关节模组。基于XHAND1类人手尺寸的空间,我们对关节模组各个部件均进行了紧凑化设计开发,并深耕底层电机的磁路拓扑与结构设计,极大地提升了关节的爆发力,XHAND1单指最大负载可以到5Kg以上,四指最大负载在20Kg以上,整手可以举起25Kg以上的哑铃。
* 数据来源于星动实验室测试结果,测试结果基于XHAND1握力和负载能力测试
实际数据可能会因使用环境条件,测试设置不同存在差异。